服务发现
服务发现一般有客户端路由和代理层路由两种
客户端路由
由调用方负责直接获取被调用方的地址,并使用load balance算法发送请求。
所有的server启动都会向注册中心注册自身的服务地址,同时可以通过心跳检测保障服务是否可用。
优点:减少代理层带来的网络通信,开发者更灵活控制路由。
缺点:客户端复杂了。
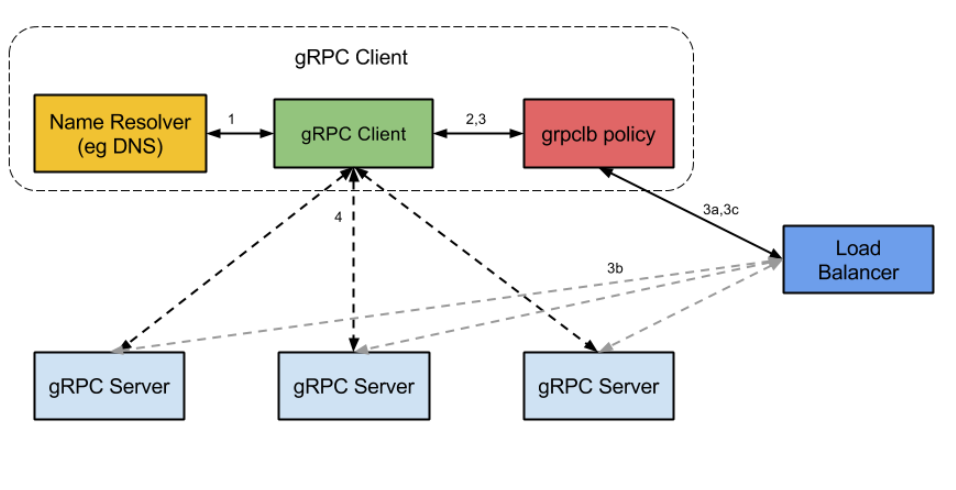
grpc官方采用的服务发现流程采用客户端路由的方式
代理层路由
不由调用方去获取,通过代理去获取。
优点:简化客户端,其中管理,可以进行统一的监控和日志管理。需要统一的通信机制。
源码解析
在源码中怎么获取到服务地址的。
resolver类其实就是通过名字去取服务的一个接口。所有的放入一个map种通过shceme进行映射builder。
其中主要有builder这个接口
type Builder interface {
//所有的子类都需要实现这个 最后返回一个有地址的resolver,也就是server的地址列表
Build(target Target, cc ClientConn, opts BuildOptions) (Resolver, error)
// Scheme returns the scheme supported by this resolver. Scheme is defined
// at https://github.com/grpc/grpc/blob/master/doc/naming.md. The returned
// string should not contain uppercase characters, as they will not match
// the parsed target's scheme as defined in RFC 3986.
Scheme() string
}
我们看一下通过的resolver实现的Builder接口
func (r *Resolver) Build(target resolver.Target, cc resolver.ClientConn, opts resolver.BuildOptions) (resolver.Resolver, error) {
r.mu.Lock()
defer r.mu.Unlock()
// Call BuildCallback after locking to avoid a race when UpdateState
// or ReportError is called before Build returns.
//这里target里面就存放的url,服务地址/服务名,cc是客户端的网络连接
//这里可以自己设计回调函数,例如日志,资源初始化等。
r.BuildCallback(target, cc, opts)
r.CC = cc
if r.lastSeenState != nil {
err := r.CC.UpdateState(*r.lastSeenState)
go r.UpdateStateCallback(err)
}
return r, nil
}
我们可以自己设计resovler和builder完成一些操作
比如我们将服务放到公司的注册中心里面,然后设置build接口,因为这里我们不依赖与DNS,而是基于服务注册中心。
func (b *OcrResolverBuilder) Build(target resolver.Target, cc resolver.ClientConn, opts resolver.BuildOptions) (resolver.Resolver, error) {
// 执行回调
if b.callback != nil {
b.callback(target, cc, opts)
}
// 假设这里从数据库中获取服务地址
// 在这里因为grpc的默认解析方式只能解析一个ip地址,所以采用自定义resovler可以解决这个问题
cfg := ocrbase.GetOcrConfig()
addresses := cfg.PPConfig.ApiUrls
// 初始化自定义解析器
resolver := &OcrResolver{
target: target,
cc: cc,
addrs: addresses,
}
// 向 gRPC 客户端更新地址
resolver.updateClientConnState()
return resolver, nil
}
在这里更新的时候 最后就到了UpdateState接口
func (ccr *ccResolverWrapper) UpdateState(s resolver.State) error {
ccr.cc.mu.Lock()
ccr.mu.Lock()
if ccr.closed {
ccr.mu.Unlock()
ccr.cc.mu.Unlock()
return nil
}
if s.Endpoints == nil {
s.Endpoints = make([]resolver.Endpoint, 0, len(s.Addresses))
for _, a := range s.Addresses {
ep := resolver.Endpoint{Addresses: []resolver.Address{a}, Attributes: a.BalancerAttributes}
ep.Addresses[0].BalancerAttributes = nil
s.Endpoints = append(s.Endpoints, ep)
}
}
//第一个是用于记录解析器状态的变化。检测resovler的state是否变化,生成日志或者跟踪事件。这里主要是帮助调试
ccr.addChannelzTraceEvent(s)
ccr.curState = s
ccr.mu.Unlock()
//这里是才是实际系统的状态进行更新
return ccr.cc.updateResolverStateAndUnlock(s, nil)
}
开发中的两个问题
这里更新ip会不会出现滞后问题,导致ip不对
一般采用watch机制,通常采用etcd或者zookeeper都有watch机制,当发现配置被修改的时候,会发送给订阅的客户
比如etcd,他的watch机制允许客户端注册一个监听器,当被监听的键值对发生变化时,主动通知客户端。
etcd的事件通知系统是实现watch机制的关键,该系统采用发布-订阅模式。也就是leader节点会发布一个事件,所有订阅了该事件的watch请求(watch请求由客户端发起,然后加入了watch队列)。
对于服务端来说有核心的几点:
- watch 功能通过 etcd 客户端与 etcd 服务端特定节点间建立的 grpc 长连接实现
- etcd 服务端模块分为上层的 serverWatchStream 和底层的 watchableStore 模块两部分
- serverWatchStream 承上启下,一方面和 etcd 客户端通过长连接通信,一方面和 watchableStore 通过 watchStream 通信交互
- 在 serverWatchStream 中会异步启动读协程 recvLoop 和写协程 sendLoop,分别负责读写客户端的请求/响应数据
- watchableStore 中会完全基于内存存储 watcher 的存储,根据是否需要回溯历史变更记录,watcher 会被分为 syncd、uysynced 两部分. 此外还有一个 victims 部分用于暂存因容量不足而发送阻塞的回调事件
- 在每个 etcd 服务端节点将数据写入状态机的位置存在一个公共的切面,在这个切面上 etcd 执行了 notify 操作,基于变更的数据记录和当前节点中存在的 watchers 进行 join,生成一个批次的 watch 回调事件,然后向上传递,完成通知回调
对于我们的注册中心其实是数据库,那这里我们相当于需要对mysql的数据变化做监听
一般包括这几种方法
- 轮询方式
- 使用触发器
- redis的pub和sub机制
- binlog方式
- canal工具
binlog方式:
开启binlog:在MySQL配置文件中,将
log_bin参数设置为ON。使用MySQL的
mysqlbinlog命令行工具将binlog中的内容读取出来,并进行解析。解析binlog中的内容,判断数据变更的类型,如果是插入、更新或删除,则触发对应的回调函数,通知后端服务进行相应的处理。
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。